top of page


LABORATORY & INFRAESTRUCTURE
Robotic Platforms
Our Robotics Lab poses comercial and home-made technological infrastructure. Presently, there are 30 robotics platforms instrumented with a variety of sensor and actuator devices. All robots are operated within the distributed multi-robot architecture S.A.M.U.R.A.I. (which stands for "Sistema de Arquitecturas de MÚltiples Robots Autónomos Integrados" in Spanish).
Some (but not all) of the robotic platforms deployed in the Robotics Lab are depicted and briefly described next.
Comercial Platforms
 Rolling humanoidHumanoid-wheeled hybrid robotic platform instrumented with a Phidget SBC3 computer and an SSC-32 servocontroller. |  Rover A4WD1Aluminum 4WD1 Rover Mobile platform instrumented with a Phidget SBC3 computer, an SSC-32 servocontroller and two Sabertooth drivers. |  HexápodoHexapod mobile platform platform instrumented with a Roboard computer and an SSC-32 servocontroller. |
|---|---|---|
 ApolloP3-AT MobileRobotics platform, teleoperable instrumented with two Unibrain Fire-i and odometry sensors |  PeopleBotMobile robot that has been instrumented with multiple sensors and capabilities such as LIDAR, pan-tilt camera, sonars, inertial unit, a touchscreen and a voice recognition system. |  HerculesP3-AT mobile robot equipped with a sensor suite for mapping and localization purposes. It includes different types of cameras, three Unibrain Fire-i for panoramic vision and two CMU for binocular vision. It also uses a FPGA for data processing and numeric analysis, and a control board which allows communication with inertial sensors and actuators. |
 OrionA P3-AT platform equipped with a Kinect and an on-board computer. |  VenusP3-AT robotic platform instrumented with a Unibrain Fire-i camera. |  AkilesP3-AT robotic platform used mainly for teleoperation experiments. |
 AmigoBotTeam of ten mobile robots deployed for experimental assignments of the Undergraduates Robotic's class. These robots are instrumented with a ring of eight ultrasonic sonar's, encoders and wireless technology. They are mainly used for mapping and navigation experiments. |
Home-made Platforms
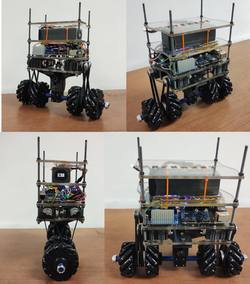 2WD Self-Balancing RobotThis is 'Everest', a rolling robot with double-sided collinear mecanum wheels for dynamics self-balancing and omnidirectional motion planning. This is a home-made experimental robotic platform, comprised of a multi-core micro-computer, a 9-axis IMU, and DC motors with high-resolution encoders. The system operates under a Debian-based Linux distribution and open source C/C++ libraries. |  Five-bar linkage leg mechanism bipedal robot - Type IThis is a bipedal robot whose lower limbs utilize a five-bar linkage mechanism as the primary kinematic structure for generating walking gaits. The robotic platform is instrumented with a 9-axis Inertial Measurement Unit (IMU) for attitude and motion sensing, and is actuated by multiple servo motors. Its control system is anchored by a Quad-core computer running Linux. The embeded system, is a multi-threading C/C++ software that calculate and execute a set of adaptive walking patterns based on f | 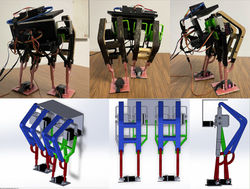 Five-bar linkage leg mechanism bipedal robot - Type IIThis is a bipedal robot whose lower limbs utilize a five-bar linkage mechanism as the primary kinematic structure for generating walking gaits. The robotic platform is instrumented with a 9-axis Inertial Measurement Unit (IMU) for attitude and motion sensing, and is actuated by multiple servo motors. Its control system is anchored by a Quad-core computer running Linux. The embeded system, is a multi-threading C/C++ software that calculate and execute a set of adaptive walking patterns based on f |
|---|---|---|
 Five-bar linkage leg mechanism bipedal robot - Type IIIThis is a bipedal robot whose lower limbs utilize a five-bar linkage mechanism as the primary kinematic structure for generating walking gaits. The robotic platform is instrumented with a 9-axis Inertial Measurement Unit (IMU) for attitude and motion sensing, and is actuated by multiple servo motors. Its control system is anchored by a Quad-core computer running Linux. The embeded system, is a multi-threading C/C++ software that calculate and execute a set of adaptive walking patterns based on f |  Five-bar linkage leg mechanism bipedal robot - Type IVThis is a bipedal robot whose lower limbs utilize a five-bar linkage mechanism as the primary kinematic structure for generating walking gaits. The robotic platform is instrumented with a 9-axis Inertial Measurement Unit (IMU) for attitude and motion sensing, and is actuated by multiple servo motors. Its control system is anchored by a Quad-core computer running Linux. The embeded system, is a multi-threading C/C++ software that calculate and execute a set of adaptive walking patterns based on f |  Robotic SubmarineThis is a laboratory-developed from scratch robotic submarine prototype. Its operation is rooted in Archimedes' Principle, precisely manipulating buoyancy and weight. The robot is equipped with magnetic gear speed reducers for both steering and forward propulsion. Its vertical movement is managed by a hydraulic piston system, which uses a home-made screw mechanism to displace a plunger, allowing for the intake of expulsion of liquid ballast. For sensing, the prototype integrates six underwater |
 Lambda-Limb BipedThis bipedal walking robot is a home-made platform that features two lower limbs powered by Chebyshev-Lambda mechanisms. Each limb is uniquely propelled by a Stirling engine, heated by magnetic inductors. A key challenge arises during the single-support phase, when only one leg is in contact with the ground; the biped naturally tends to lose lateral balance. To counteract this, a reaction wheel, positioned in the robot's upper section, generates tangential forces through its rotation, effective |  Reaction Wheel Self-Balancing UnicycleThis unicycle robotic platform is a prototype fully designed and developed in our laboratory from scratch. It utilizes its traction wheel for dual purposes: not only for propulsion and navigation but also for achieving pitch autobalance, effectively functioning as an inverted pendulum. Complementing this, a reaction wheel is strategically mounted, rotating laterally to the robot's chassis. This wheel generates precisely controlled tangential forces to maintain roll autobalance, ensuring the rob |  Self-Balancing UnicycleThis unicycle robot, a completely in-house designed and developed laboratory prototype, features an optimized chassis geometry. Its traction wheel serves a dual purpose: it propels the robot for navigation and simultaneously achieves pitch autobalance, effectively functioning as an inverted pendulum. Additionally, a reaction wheel is strategically mounted to rotate laterally to the robot's chassis. This wheel generates precisely controlled tangential forces to maintain roll autobalance, ensurin |
 2WD Dynamic Self-Balancing RobotThis is a home-made two-wheeled, self-balancing inverted pendulum robot platform, designed for combined autobalance and navigation through asynchronous control of its wheels. It was instrumented with two DC motors and pulse encoders for precise motion feedback, alongside a 9-axis inertial measurement unit (IMU) for comprehensive orientation sensing. Powering its operations is a 64-bit computer running a Linux kernel, with all its advanced autobalance and navigation control algorithms programmed | 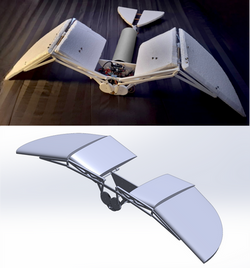 Ornitopter ProtoypeThis bio-inspired, flapping-wing aerial robotic platform was entirely designed and developed in our laboratory. It features a DC motor with a pulse encoder for wing actuation, and a servo motor for rudder control at the ornithopter's tail. Additionally, an oscillatory mechanism with a speed reducer was designed specifically for the wings. The platform is instrumented with a 64-bit mini-computer running a Linux kernel, a 9-axis IMU, and a barometer. Its primary use is for designing flight mechan |  Two Mechanum Wheeled Self-Balancing RobotThis is an in-house developed, two-wheeled, self-balancing robot utilizing Mecanum wheels. These specialized wheels feature rollers oriented at a 45-degree angle, laterally aligned, which impart unique kinematic behavior to the robot. The non-conventional motion equations describing the robot's movement on the ground enable it to achieve omnidirectional locomotion while maintaining self-balance. Powering the robot is a 64-bit computer running a Linux kernel. Its sensing and actuation systems in |
 Reaction Wheel Self-Balancing BicycleThis bicycle-type robotic platform, a complete in-house design and development from our laboratory, achieves stability and motion through user-defined control algorithms. It employs a traction motor for the rear wheel to provide propulsion, while a servomotor precisely steers the front wheel. For roll autobalance, a dedicated reaction wheel is integrated into the system. The platform's operation is supported by a 6-axis IMU for orientation sensing, encoders for accurate motion feedback, and a 6 |  2WD Self-Balancing RobotThis is a 2W2D self-balancing platform equipped with active suspensions in its limbs, enabling it to adjust its height and/or evade tall obstacles. It is constructed with two side-mounted DC traction motors featuring encoders, and two additional DC motors specifically for controlling the active suspensions and/or altering the posture of its limbs, which are designed as four-bar planar mechanisms. The robot is instrumented with a 6-axis IMU and a 64-bit computer running a Linux kernel. Its contr |  Spherical ProbeSpherical robot with an underactuated control of a dual-rotor. |
 Rover 4W4DHome-made four-wheel, four-drive robotic platform with magnetic encoders. |  Klann-Jansen PlatformHome-made robotic platform based on a kinetic designs by Joe Klann and Theo Jansen. |  Quadruped PlatformThis robot is a home-made quadruped platform with underactuated legs based on Klann mechanisms. Its trajectory is controlled by a velocity-based control approach, which feedbacks speed through home-made low-resolution odometers of Hall-effect. |
 Jansen PlatformHome-made robotic platform based on a kinetic design by Theo Jansen. |  RobbieHome-made two-wheeled robot, with two crazy wheels and instrumented with a Cerebot 32MX4. |  Sensing SuiteSensor suite with three Unibrain Fire-i for panoramic vision and two CMU for binocular vision. It uses a FPGA for data processing and numeric analysis, and a control board which allows communication with inertial sensors and actuators. |
 Robotic armslayout Home-made omnidirectional robotic platforms with circular shape. They use omni-wheels in order to move in any direction. With these platforms. Both arms are instrumented with an SSC-32 servo-controller,e one with USB connection and another with Serial. |  DoraemonHome-made omnidirectional robotic platform with circular shape. Uses omni-wheels in order to move in any direction. Instrumented with a Mini-box computer and a Cerebot 32MX4. |  AstroboyBased in its predecessors, it was created to interact with humans. As a three-wheeled-humanoid, this robot has two cameras that work as eyes, speakers and a microphone to communicate with people and recieve instructions, and inertial sensors. |
 Omnibot-type PlatformsHome-made omnidirectional robotic platforms with circular shape and omni-wheels in order to provide mobility in any direction. |  RoverHome-made four-wheeled robot instrumented with a motherboard, inertial sensors and a web cam. |  FTCHHome-made all-terrain robot equipped with a Mini Box and a camera, which are managed by a motherboard. |
 PopeyeIt is a 4WD all-terrain wheele mobile robot with independent spring-mass suspension system. It's equipped with GPS, AD-HOC wireless technology, inertial units such as accelerometers, gyros, compass, etcetera. |  YoshimpyHome-made all-terrain platform equipped with inertial units and a vision sensor. |  FrankieHome-made platform, with two wheels and a castor wheel. Instrumented with a LIDAR sensor and a Mini-box. |
 SkyBotHome-made aerial robotic quadrotor platform. It's made with a lightway material and a metallic camera filled with helium to help the platform to fly and stabilize. It has four motors with propellers, a 28gr computer. This robot can be controlled with a GUI specially designed for it or with a joystick. |  OsunitaIs a home-made differential control robotic platform with four wheels and is controlled with a netbook. along with a variety of sensors on it: a webcam, inertial sensors and a LIDAR sensor. |
Computing
 SAMURAI ArquitectureOperating System for Distributed Robotic System named as SAMURAI (Sistema de Arquitecturas de MÚltiples Robots Autónomos Integrados. for its Spanish initials), and robotic KatanaLibs. The Katana Libraries were developed in the laboratory, and are used to manage a variety of sensors to accomplish robotic tasks such as: Vision, Teleoperation, Numeric Computing, Control, etc., in a Real-Time scheme. |  High Performance ClusterMost of the tasks developed in the lab requires a high computing capacity, for this reason a high performance cluster has been configured in four of the lab's computers. This technique uses parallel computing by using labour division between the computer cores. In total, our 'Greek Island Cluster' is conformed of 24 cores, 16 are physical and 8 virtual. This cluster has allowed students to process information from all experiments at a greater rate, reducing the computing time. |
|---|
bottom of page